Loading...
Searching...
No Matches
AllanVarianceNoise.hpp File Reference
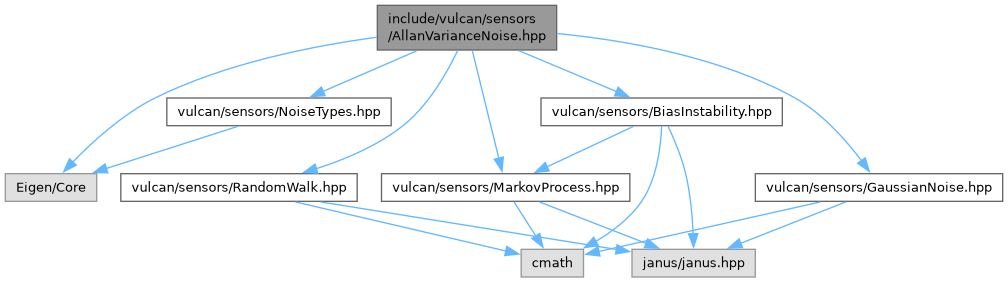
#include <Eigen/Core>#include <vulcan/sensors/BiasInstability.hpp>#include <vulcan/sensors/GaussianNoise.hpp>#include <vulcan/sensors/MarkovProcess.hpp>#include <vulcan/sensors/NoiseTypes.hpp>#include <vulcan/sensors/RandomWalk.hpp>
Include dependency graph for AllanVarianceNoise.hpp:
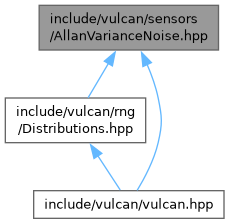
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | vulcan::allan::AxisState< Scalar > |
| Combined noise state for a single sensor axis. More... | |
| struct | vulcan::allan::AxisCoeffs |
| Pre-computed coefficients for single axis. More... | |
| struct | vulcan::allan::IMUNoiseState< Scalar > |
| Complete 3-axis IMU noise state. More... | |
| struct | vulcan::allan::IMUNoiseCoeffs |
| Complete IMU noise coefficients. More... | |
| struct | vulcan::allan::IMUNoiseInput< Scalar > |
| Noise input structure for IMU step. More... | |
Namespaces | |
| namespace | vulcan |
| namespace | vulcan::allan |
Functions | |
| template<typename Scalar> | |
| AxisState< Scalar > | vulcan::allan::init_axis_state () |
| Initialize per-axis state to zero. | |
| AxisCoeffs | vulcan::allan::compute_axis_coeffs (const sensors::AllanParams< double > ¶ms, double dt) |
| Compute per-axis coefficients from Allan parameters. | |
| template<typename Scalar> | |
| Scalar | vulcan::allan::step_axis (AxisState< Scalar > &state, const AxisCoeffs &coeffs, const Scalar &noise_arw, const Scalar &noise_bias, const Scalar &noise_rrw) |
| Step single-axis noise model. | |
| template<typename Scalar> | |
| IMUNoiseState< Scalar > | vulcan::allan::init_state () |
| Initialize IMU noise state. | |
| IMUNoiseCoeffs | vulcan::allan::compute_coeffs (const sensors::AllanParams< double > &gyro_params, const sensors::AllanParams< double > &accel_params, double dt) |
| Compute IMU coefficients from Allan parameters. | |
| template<typename Scalar> | |
| sensors::IMUNoiseSample< Scalar > | vulcan::allan::step (IMUNoiseState< Scalar > &state, const IMUNoiseCoeffs &coeffs, const IMUNoiseInput< Scalar > &input) |
| Step the complete IMU noise model. | |
| template<typename Scalar> | |
| sensors::IMUNoiseSample< Scalar > | vulcan::allan::step_simple (IMUNoiseState< Scalar > &state, const IMUNoiseCoeffs &coeffs, const Eigen::Vector< Scalar, 3 > &gyro_noise, const Eigen::Vector< Scalar, 3 > &accel_noise) |
| Simplified step with single noise vector per sensor. | |
| IMUNoiseCoeffs | vulcan::allan::consumer_grade_coeffs (double dt) |
| Compute coefficients for consumer-grade IMU. | |
| IMUNoiseCoeffs | vulcan::allan::industrial_grade_coeffs (double dt) |
| Compute coefficients for industrial-grade IMU. | |
| IMUNoiseCoeffs | vulcan::allan::tactical_grade_coeffs (double dt) |
| Compute coefficients for tactical-grade IMU. | |
| IMUNoiseCoeffs | vulcan::allan::navigation_grade_coeffs (double dt) |
| Compute coefficients for navigation-grade IMU. | |