Loading...
Searching...
No Matches
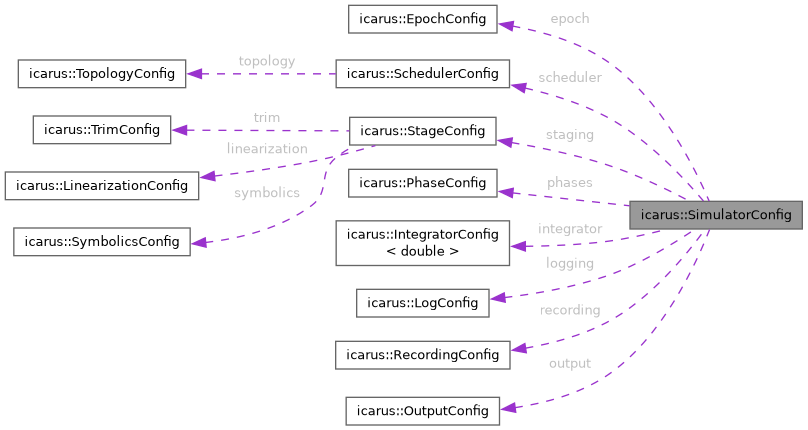
icarus::SimulatorConfig Struct Reference
Complete simulation configuration. More...
#include <SimulatorConfig.hpp>
Collaboration diagram for icarus::SimulatorConfig:
Public Member Functions | |
| std::vector< std::string > | Validate () const |
| Validate configuration consistency. | |
Static Public Member Functions | |
| static SimulatorConfig | Default () |
| Create default config. | |
| static SimulatorConfig | FromFile (const std::string &path) |
| static SimulatorConfig | FromFiles (const std::string &, const std::string &) |
Public Attributes | |
| std::string | name = "Simulation" |
| std::string | version = icarus::Version() |
| std::string | description |
| std::string | source_file |
| Path to source YAML file (set by loader). | |
| double | t_start = 0.0 |
| double | t_end = 100.0 |
| double | dt = 0.01 |
| Note: may be auto-derived from scheduler. | |
| EpochConfig | epoch |
| std::vector< ComponentConfig > | components |
| std::vector< signal::SignalRoute > | routes |
| SchedulerConfig | scheduler = SchedulerConfig::Default() |
| StageConfig | staging |
| PhaseConfig | phases |
| IntegratorConfig< double > | integrator = IntegratorConfig<double>::RK4Default() |
| LogConfig | logging |
| RecordingConfig | recording |
| OutputConfig | output |
Detailed Description
Complete simulation configuration.
Loaded from simulation.yaml master binding file. All sub-configs can be inline or referenced via includes.
NOT templated - uses double for numeric values.
Member Function Documentation
◆ Default()
|
inlinestaticnodiscard |
Create default config.
◆ FromFile()
|
inlinestaticnodiscard |
Load from master binding file
- Note
- Implementation in SimulationLoader.hpp to avoid circular include
◆ FromFiles()
|
inlinestaticnodiscard |
Load from master + explicit routes file
- Note
- Use SimulationLoader::Load() which handles routes in the main config
◆ Validate()
|
inlinenodiscard |
Validate configuration consistency.
Member Data Documentation
◆ components
| std::vector<ComponentConfig> icarus::SimulatorConfig::components |
◆ description
| std::string icarus::SimulatorConfig::description |
◆ dt
| double icarus::SimulatorConfig::dt = 0.01 |
Note: may be auto-derived from scheduler.
◆ epoch
| EpochConfig icarus::SimulatorConfig::epoch |
Epoch configuration for absolute time support When configured, enables time scale conversions (UTC, TAI, GPS, etc.)
◆ integrator
| IntegratorConfig<double> icarus::SimulatorConfig::integrator = IntegratorConfig<double>::RK4Default() |
◆ logging
| LogConfig icarus::SimulatorConfig::logging |
◆ name
| std::string icarus::SimulatorConfig::name = "Simulation" |
◆ output
| OutputConfig icarus::SimulatorConfig::output |
◆ phases
| PhaseConfig icarus::SimulatorConfig::phases |
◆ recording
| RecordingConfig icarus::SimulatorConfig::recording |
◆ routes
| std::vector<signal::SignalRoute> icarus::SimulatorConfig::routes |
◆ scheduler
| SchedulerConfig icarus::SimulatorConfig::scheduler = SchedulerConfig::Default() |
◆ source_file
| std::string icarus::SimulatorConfig::source_file |
Path to source YAML file (set by loader).
◆ staging
| StageConfig icarus::SimulatorConfig::staging |
◆ t_end
| double icarus::SimulatorConfig::t_end = 100.0 |
◆ t_start
| double icarus::SimulatorConfig::t_start = 0.0 |
◆ version
| std::string icarus::SimulatorConfig::version = icarus::Version() |
The documentation for this struct was generated from the following files:
- include/icarus/sim/SimulatorConfig.hpp
- include/icarus/io/SimulationLoader.hpp