Loading...
Searching...
No Matches
ExtendedKF.hpp File Reference
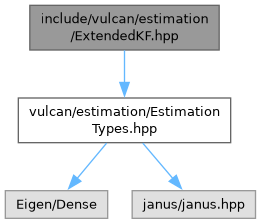
#include <vulcan/estimation/EstimationTypes.hpp>
Include dependency graph for ExtendedKF.hpp:
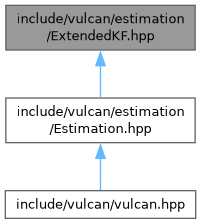
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | vulcan |
| namespace | vulcan::estimation |
Functions | |
| template<typename Scalar, int N, int U, typename DynamicsFunc> | |
| FilterState< Scalar, N > | vulcan::estimation::ekf_predict (const FilterState< Scalar, N > &state, const Eigen::Matrix< Scalar, U, 1 > &u, DynamicsFunc f, const Eigen::Matrix< double, N, N > &F, const ProcessNoise< N > &noise) |
| Extended Kalman filter predict step. | |
| template<typename Scalar, int N, typename DynamicsFunc> | |
| FilterState< Scalar, N > | vulcan::estimation::ekf_predict (const FilterState< Scalar, N > &state, DynamicsFunc f, const Eigen::Matrix< double, N, N > &F, const ProcessNoise< N > &noise) |
| Extended Kalman filter predict (no control input). | |
| template<typename Scalar, int N, int M, typename MeasurementFunc> | |
| FilterState< Scalar, N > | vulcan::estimation::ekf_update (const FilterState< Scalar, N > &state, const Eigen::Matrix< Scalar, M, 1 > &z, MeasurementFunc h, const Eigen::Matrix< double, M, N > &H, const MeasurementNoise< M > &noise) |
| Extended Kalman filter update step. | |
| template<typename Scalar, int N, int U, int M, typename DynamicsFunc, typename MeasurementFunc> | |
| FilterState< Scalar, N > | vulcan::estimation::ekf_step (const FilterState< Scalar, N > &state, const Eigen::Matrix< Scalar, U, 1 > &u, const Eigen::Matrix< Scalar, M, 1 > &z, DynamicsFunc f, MeasurementFunc h, const Eigen::Matrix< double, N, N > &F, const Eigen::Matrix< double, M, N > &H, const ProcessNoise< N > &Q, const MeasurementNoise< M > &R) |
| Combined EKF step (predict + update). | |