Loading...
Searching...
No Matches
RotationKinematics.hpp File Reference
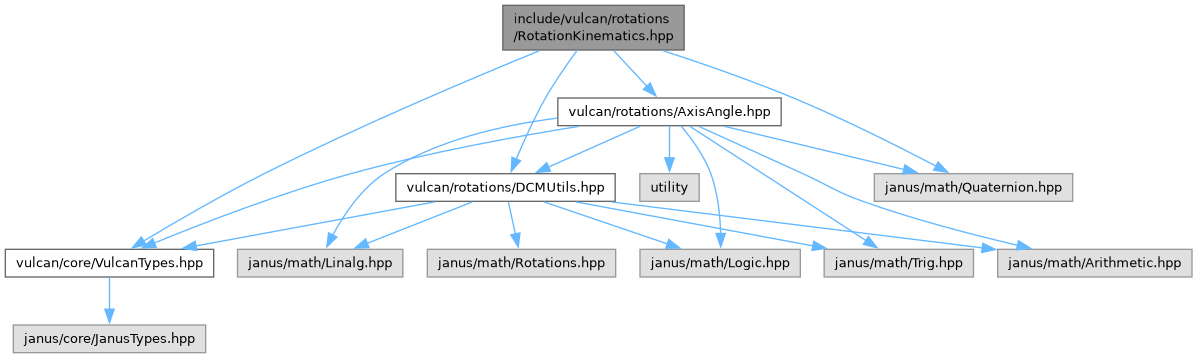
#include <vulcan/core/VulcanTypes.hpp>#include <vulcan/rotations/AxisAngle.hpp>#include <vulcan/rotations/DCMUtils.hpp>#include <janus/math/Quaternion.hpp>
Include dependency graph for RotationKinematics.hpp:
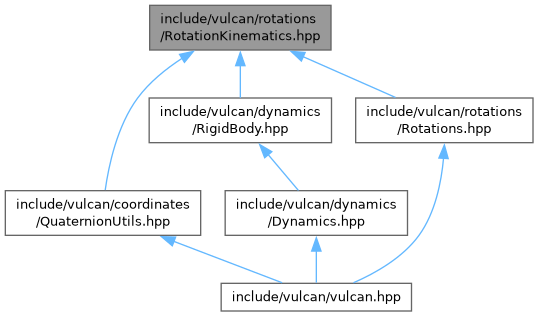
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | vulcan |
Functions | |
| template<typename Scalar> | |
| Vec3< Scalar > | vulcan::omega_from_quaternion_rate (const janus::Quaternion< Scalar > &q, const janus::Quaternion< Scalar > &q_dot) |
| template<typename Scalar> | |
| janus::Quaternion< Scalar > | vulcan::quaternion_rate_from_omega (const janus::Quaternion< Scalar > &q, const Vec3< Scalar > &omega_body) |
| template<typename Scalar> | |
| Vec3< Scalar > | vulcan::omega_from_dcm_rate (const Mat3< Scalar > &R, const Mat3< Scalar > &R_dot) |
| template<typename Scalar> | |
| Mat3< Scalar > | vulcan::dcm_rate_from_omega (const Mat3< Scalar > &R, const Vec3< Scalar > &omega_body) |
| template<typename Scalar> | |
| janus::Quaternion< Scalar > | vulcan::compose_rotations (const janus::Quaternion< Scalar > &q1, const janus::Quaternion< Scalar > &q2) |
| template<typename Scalar> | |
| janus::Quaternion< Scalar > | vulcan::relative_rotation (const janus::Quaternion< Scalar > &q_from, const janus::Quaternion< Scalar > &q_to) |
| template<typename Scalar> | |
| Vec3< Scalar > | vulcan::rotation_error (const janus::Quaternion< Scalar > &q_actual, const janus::Quaternion< Scalar > &q_desired) |