Loading...
Searching...
No Matches
FrameVehicle.hpp File Reference
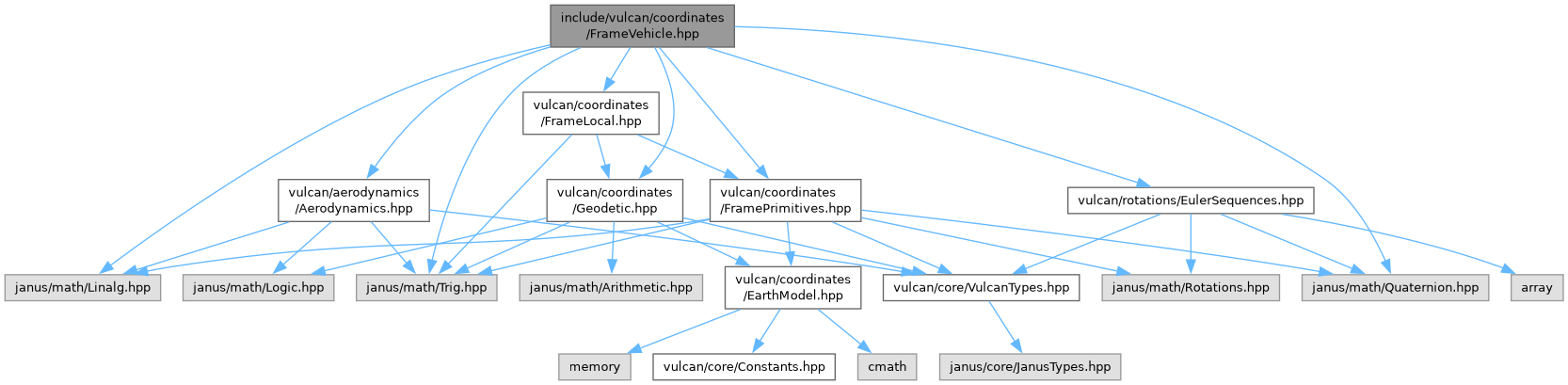
#include <vulcan/aerodynamics/Aerodynamics.hpp>#include <vulcan/coordinates/FrameLocal.hpp>#include <vulcan/coordinates/FramePrimitives.hpp>#include <vulcan/coordinates/Geodetic.hpp>#include <vulcan/rotations/EulerSequences.hpp>#include <janus/math/Linalg.hpp>#include <janus/math/Quaternion.hpp>#include <janus/math/Trig.hpp>
Include dependency graph for FrameVehicle.hpp:
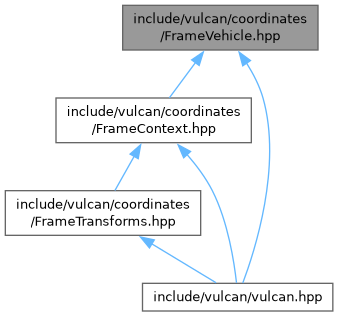
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | vulcan |
Functions | |
| template<typename Scalar> | |
| CoordinateFrame< Scalar > | vulcan::body_from_quaternion (const CoordinateFrame< Scalar > &ned, const janus::Quaternion< Scalar > &q_body_to_ned) |
| template<typename Scalar> | |
| janus::Quaternion< Scalar > | vulcan::quaternion_from_body (const CoordinateFrame< Scalar > &body, const CoordinateFrame< Scalar > &ned) |
| template<typename Scalar> | |
| CoordinateFrame< Scalar > | vulcan::body_from_euler (const CoordinateFrame< Scalar > &ned, Scalar yaw, Scalar pitch, Scalar roll) |
| template<typename Scalar> | |
| Vec3< Scalar > | vulcan::euler_from_body (const CoordinateFrame< Scalar > &body, const CoordinateFrame< Scalar > &ned) |
| template<typename Scalar> | |
| CoordinateFrame< Scalar > | vulcan::velocity_frame (const Vec3< Scalar > &velocity_ecef, const CoordinateFrame< Scalar > &ned) |
| template<typename Scalar> | |
| Vec2< Scalar > | vulcan::flight_path_angles (const Vec3< Scalar > &velocity_ned) |
| template<typename Scalar> | |
| Vec2< Scalar > | vulcan::flight_path_angles (const Vec3< Scalar > &velocity_ecef, const CoordinateFrame< Scalar > &ned) |
| template<typename Scalar> | |
| Vec2< Scalar > | vulcan::aero_angles (const Vec3< Scalar > &velocity_ecef, const CoordinateFrame< Scalar > &body) |
| template<typename Scalar> | |
| Vec2< Scalar > | vulcan::aero_angles (const Vec3< Scalar > &velocity_body) |
| Compute aerodynamic angles from velocity in body frame. | |