Loading...
Searching...
No Matches
Distributions.hpp File Reference
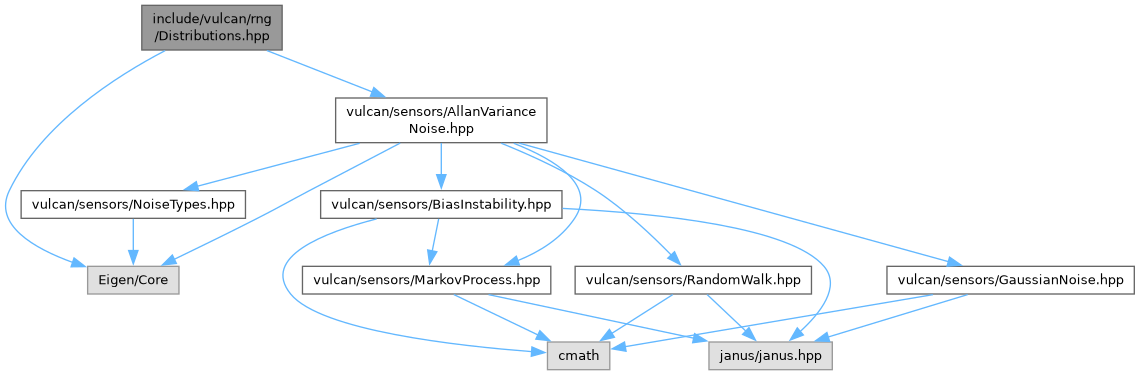
Higher-level noise generators for sensor simulation. More...
Include dependency graph for Distributions.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | vulcan |
| namespace | vulcan::rng |
Functions | |
| template<typename RNGType> | |
| allan::IMUNoiseInput< double > | vulcan::rng::generate_imu_noise (RNGType &rng) |
| Generate IMU noise input for Allan variance model. | |
| template<typename RNGType> | |
| Eigen::Vector3d | vulcan::rng::generate_noise3 (RNGType &rng) |
| Generate 3-axis white noise. | |
| template<int N, typename RNGType> | |
| Eigen::Vector< double, N > | vulcan::rng::generate_noiseN (RNGType &rng) |
| Generate N-dimensional white noise. | |
| template<int N, typename RNGType> | |
| Eigen::Vector< double, N > | vulcan::rng::generate_correlated_noise (RNGType &rng, const Eigen::Matrix< double, N, N > &L) |
| Generate correlated noise with given Cholesky factor. | |
| template<typename RNGType> | |
| Eigen::VectorXd | vulcan::rng::generate_correlated_noise (RNGType &rng, const Eigen::MatrixXd &L) |
| Generate correlated noise for dynamic-size matrices. | |
| template<typename RNGType> | |
| void | vulcan::rng::generate_turbulence_noise (RNGType &rng, double &noise_u, double &noise_v, double &noise_w) |
| Generate turbulence forcing noise (3 independent channels). | |
Detailed Description
Higher-level noise generators for sensor simulation.
Provides convenience functions for generating noise samples compatible with Vulcan sensor models.